




近日,电气与电子信息学院杨勇副教授团队在非线性控制领域取得新进展,相继在《IEEE Transactions on Automation Science and Engineering》(IEEE T-ASE)《Control Engineering Practice》《ISA Transactions》《Nonlinear Dynamics》等国际知名期刊发表研究论文,西华大学为论文第一单位。
面向永磁同步电机在机器人、精密仪器和数控加工等高端装备领域的需求,团队在《IEEE Transactions on Automation Science and Engineering》(中科院JCR 2区)发表题为“Enhanced Disturbance Attenuation for PMSM Speed Control Based on Advanced Fast Reaching and Iterative Composite Compensation”的研究论文。针对电机转矩脉动与负载扰动等问题,提出了一种基于先进快速趋近律与迭代复合补偿的永磁同步电机增强抗扰调速方法,利用迭代学习和滑模观测器方法有效提高了负载扰动观测精度与系统鲁棒性。IEEE T-ASE为IEEE旗下的自动化科学与工程领域的顶级期刊。涵盖了自动化领域的各个方面,包括自动化理论、方法与算法、自动化系统与工程、人工智能在自动化中的应用、生物医学自动化等。

IEEE T-ASE论文截图
围绕可穿戴外骨骼机器人安全人机交互,团队在《Control Engineering Practice》(中科院JCR 2区)发表题为“Reference trajectory learning based adaptive iterative impedance control for a lower limb rehabilitation exoskeleton with actuator saturation”的论文。提出了一种双迭代环阻抗学习控制策略,外环利用力矩迭代学习肢体运动意图,内环采用位置迭代实现阻抗调控。《Control Engineering Practice》是工程控制领域顶级期刊,《Automatica》的姊妹期刊,仅发表对先进控制技术具有重要应用价值的成果。此外,团队还在《ISA Transactions》(中科院JCR 2区Top)上发表题为“Adaptive neural fault-tolerant prescribed performance control of a rehabilitation exoskeleton for lower limb passive training”的论文,解决了执行器故障条件下可穿戴外骨骼机器人预定性能容错控制问题。
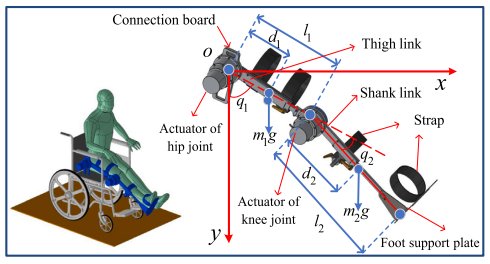
可穿戴外骨骼机器人示意图
针对高速列车运行控制问题,团队在《Nonlinear Dynamics》(中科院JCR 2区)发表题为“Adaptive iterative learning unified operation control for high-speed train considering electrical structure model and temperature compensation”的论文。将高速列车电气化系统的电结构模型引入牵引/制动系统,同时兼顾不同运行区间气候变化对高速列车空气阻尼的影响,提出了可用于时速350km/h的高铁动车组一致运行控制方案。《Nonlinear Dynamics》是非线性力学领域国际著名期刊,发表非线性力学、动力学控制、机器人及航空航天、多体动力学等领域研究成果。
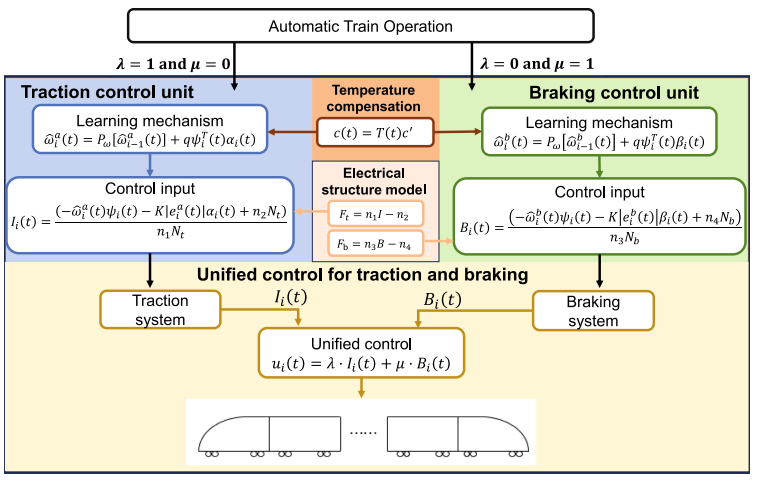
高铁动车组一致运行控制方案示意图





 川公网安备 51010602000503号
川公网安备 51010602000503号